Where to Map? Iterative Rover-Copter Path planning for Mars Exploration
Where to Map? Iterative Rover-Copter Path planning for Mars Exploration , Takahiro Sasaki, Kyohei Otsu, Rohan Thakker, Sofie Haesaert, Ali-akbar Agha-mohammad
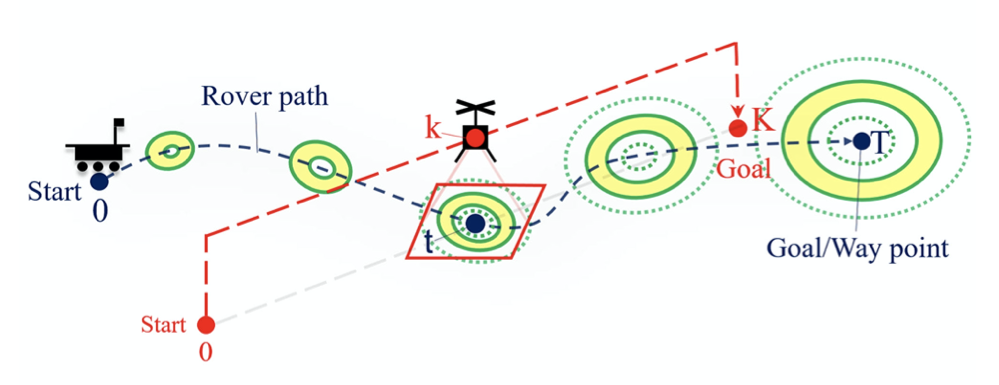
This joint work with the Jet Propulsion lab has finally been published. I am happy to have been a part of this interesting research in which we looked how a copter could improve the localisation and navigation of a rover.